projet à l'international
ALIREZA TURE SAVADKOOHI LTDS ENTPE
alireza.turesavadkoohi@nullentpe.fr

- University Sherbrooke: structures de lignes de transport d’énergie, modélisation des systèmes d’amortissement, essais dynamiques.
- Polytechnique Montréal: modélisation par éléments finis, dynamique des câbles.

Ce projet s’intègre au domaine des structures de lignes de transport d’énergie et plus spécifiquement au domaine de la mécanique de conducteurs qui représente le cœur du réseau de transport d’électricité. Les gestionnaires de réseaux partout dans le monde font face à des défis très importants pour transporter et fournir de façon fiable de l’électricité dans les centres de consommation. Dans la plupart des pays industrialisés, le réseau est vieillissant et les attentes du public sont très élevées. Les différents phénomènes d’oscillations des conducteurs représentent une menace constante à la fiabilité et l’intégrité du réseau. Le phénomène de galop, qui mène à de grandes amplitudes de vibrations, doit être maîtrisé en particulier, car il cause régulièrement des pannes ou de l’endommagement en fatigue des conducteurs. La maîtrise de ce phénomène passe par plusieurs méthodes et systèmes de vibrations, mais aucun système existant ne fait l’unanimité parmi les entreprises gestionnaires de réseaux.
La méthode proposée pourrait réduire significativement l’impact du galop sur les lignes de transport d’énergie et ainsi réduire les pertes et les coûts associés à ce phénomène.
RESULTATS
Le projet a réuni trois partenaires internationaux de recherche et d’enseignement supérieur aux activités complémentaires : ENTPE/LTDS, l’Université de Sherbrooke, Polytechnique Montréal et une entreprise étrangère, Hydro-Québec. Ce projet a consolidé les collaborations en vue d’aborder ensemble de nouveaux problèmes scientifiques. Par exemple, dans le cadre du projet CONOG, une nouvelle thèse de doctorat en cotutelle entre LTDS et l’Université de Sherbrooke a débuté en octobre 2024. Le contrôle du galop des lignes de transport d’électricité présente un intérêt pour les secteurs français comme RTE. 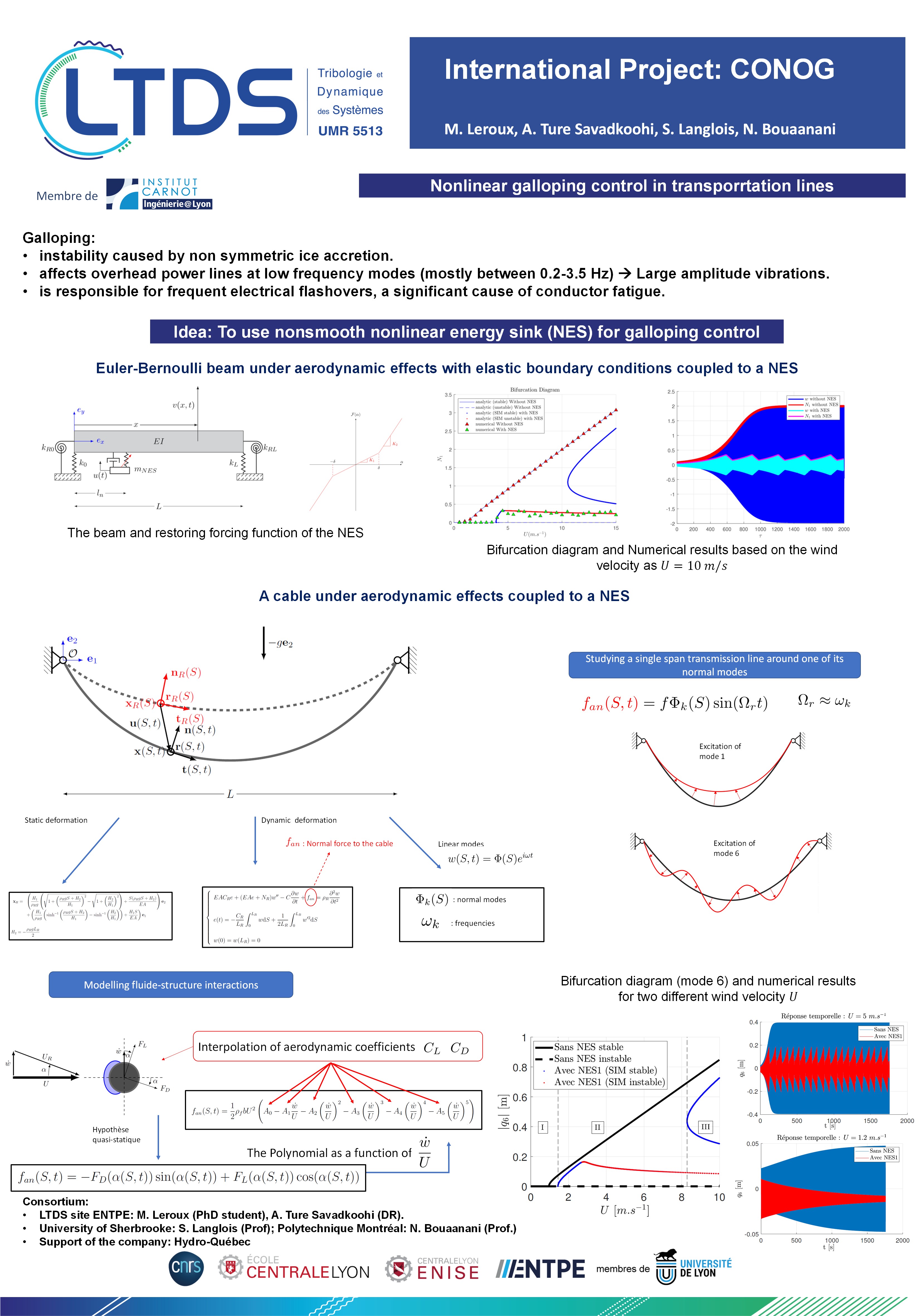
Peer reviewed international journal papers:
1- Leroux, M., Langlois, S., and Ture Savadkoohi, A. (2023) Investigation of nonlinear control of galloping with a linear beam with elastic boundary conditions. International Journal of Non-Linear Mechanics, 156 :104484.
2- Leroux, M. Ture Savadkoohi, Langlois, S. Bouaanani, N. and Van Dyke, P. (2025) Galloping control of transmission lines using nonlinear absorbers. Nonlinear Dynamics, 113: 30397–30426
Presentation in Conferences:
1- Leroux, M., Ture Savadkoohi, A., Langlois, S. Contrôle d’un mode d’une ligne aérienne de transport d’énergie avec un amortisseur non-linéaire, 15ème colloque national en calcul des structures (CSMA 2022), 16-20 Mai 2022, Giens, France.
2- Leroux, M., Ture Savadkoohi, A., Langlois, S. Single mode control of overhead transmission line conductor with a nonlinear absorber, 10th European Nonlinear Dynamics Conference (ENOC 2022) 17-22 July 2022, Lyon, France.
3- Leroux, M., Ture Savadkoohi, A., Langlois, S. Galloping control of single conductors in overhead transmission lines using non-linear energy sink, 3rd International Symposium on Dynamics and Aerodynamics of Cables (ISDAC 2023) 15-17 June 2023, Rome, Italy.
4- LeRoux, M., Langlois, S., and Ture Savadkoohi, A. Nonlinear passive control of galloping of overhead transmission lines: design and numerical verifications, Resonance conference (SURVISHNO) 10-13 July 2023, Toulouse, France.
5- Leroux, M., Langlois, S., and Ture Savadkoohi, A. Une étude analytique pour le contrôle passif non-linéaire du galop sur les lignes aériennes de transport d’énergie, Colloque 2023 du CEISCE, 17 Novembre 2023, Montréal, Canada.
6- Leroux, M., Ture Savadkoohi, A., Langlois, S. Investigation on nonlinear galopping control of transmission lines, 11th European Nonlinear Dynamics Conference (ENOC 2024) July 22-26, 2024, Delft, The Netherlands.

CALY TECHNOLOGIES, MECALAM, CCI LYON, VIBRATEC, THALES, AREVA, VOLVO, RENAULT, MICHELIN, ANNEALSYS, HUTCHINSON, EDF R&D ENERBAT, RIBER, SKF, EDF, PSA Peugeot-Citroen, SAFRAN, CARA, ST MICROELECTRONICS, ...

 Espace membres
Espace membres